Integrated Knowledge-Based Decision Framework for Robot Selection
Because of the wide selection of robot attributes and candidate robots, expert decision methods are a viable approach for robot selection. After gathering information about the robot application, an expert system is used to provide a list of pertinent attributes and their acceptable values.
Based on the analysis of the entire production cell, some robot selection attributes may be ignored whereas others may be considered as critical. Through the integration of an expert system with the database of available robots, a shortlist of robots meeting the minimum acceptable values is determined.
The selection of the most suitable robot cannot be accomplished through an inference procedure based on symbolic reasoning. Thus, an appropriate analytical decision making tool needs to be employed to determine the best robot, which results in moving from the expert system part to the decision model base. The basic structure of an integrated knowledge-based decision system is depicted in Fig. 3.

Figure 3. Structure of an integrated knowledge-based decision system
The procedure is initiated by seeking information from the user about the application for which the robot is required. Potential applications are listed as spot welding, arc welding, machine loading, die casting, forging, plastic molding, spray painting, materials handling, assembly, and inspection. The list may be extended to cover more applications.
When the user identifies the type of application, the expert system is used to determine the set of key attributes for the particular application with their threshold values. Benefiting from the literature on robot selection (11-17) and the expert interviews, the robot parameters taken into consideration can be listed as
- Configuration
- Degrees of freedom
- Vertical reach
- Horizontal reach
- Power source (drive)
- Weight
- Control type
- Accuracy
- Repeatability
- Load capacity
- Velocity
- Programming method
- Programming language
- Memory size
The list of robot attributes given above is not meant to be comprehensive, and it can be easily expanded. Attributes with discrete states are assigned code numbers where each code number denotes the state of the attribute. For example, code numbers from 1 to 7 are used to represent degrees of freedom, where code numbers 1 to 6 denote the respective degrees of freedom, whereas code number 7 corresponds to degrees of freedom greater than or equal to 7. On the other hand, for attributes with values grouped as ranges, code numbers are assigned corresponding to the range in which the value of the respective attribute lies. For example, an attribute whose values are grouped as ranges is given in Table 2.
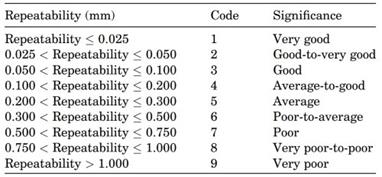
Table 2. Coding of the Parameter Repeatability
For the cases where the user does not specify a code number, the user is reminded by a prompt that an attribute value is not entered. If the user does not possess adequate information regarding the attribute value, then a default value is assigned by the expert system. An example for the list of robot parameters for the robot selection problem is depicted in Fig. 4.
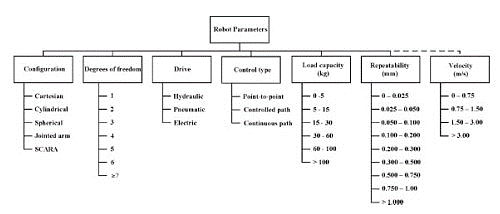
Figure 4. Example of parameters listing for the robot selection problem
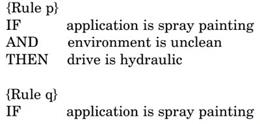
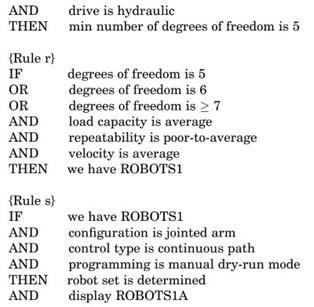
For illustrative purposes, spray painting is considered as the application type. Spray painting, like many other robot applications, presents safety and health hazards while requiring precision. In general, hydraulic or pneumatic robots are employed for spray painting. Spray painting necessitates the use of continuous path control since the cavities of the painted piece-part must be reached by the robot.
The expert system is employed to obtain a list of robot alternatives that meet the minimum performance requirements. If none of the robots satisfies the specified requirements, then the user is asked to revise the parameter values. Although the basic structure remains the same for all types of applications, the order of questions may vary for the considered application as key parameters for robot selection may differ according to the application type. A set of sample rules called for the spray painting application can be given as follows:
The decision problem aims to determine the best robot alternative from the short-list of candidates determined using the expert system module by taking into consideration customer requirements (hereafter named as user requirements) and robot characteristics, the relationships between user requirements and robot characteristics, and the interactions between robot characteristics. The algorithm developed to rank the robot alternatives is summarized in Table 3.
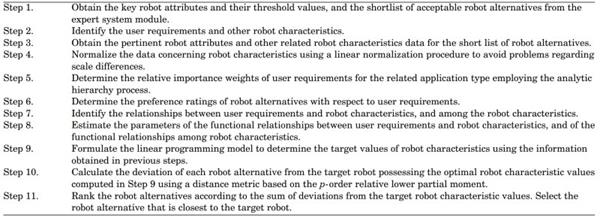
Table 3. Stepwise Representation of the Algorithm Employed in the Decision Model Base to Rank the Short List of Robot Alternatives
Major user requirements for an industrial robot can be denoted as improved product quality, reduced cycle time, improved manufacturing flexibility, easier and standardized programming, improved precision, improved reliability and stability, improved potential to interface with existing equipment, reduced costs, and vendor support.
The prototype HOQ given in Fig. 5 illustrates the user requirements and robot characteristics, and the related data for the short list of robot alternatives. The relationship matrix in the HOQ is used to represent the relationships between the manufacturing firm’s demands regarding product quality, manufacturing flexibility, vendor support, and so on, and robot characteristics such as repeatability, velocity, load capacity, and so on.
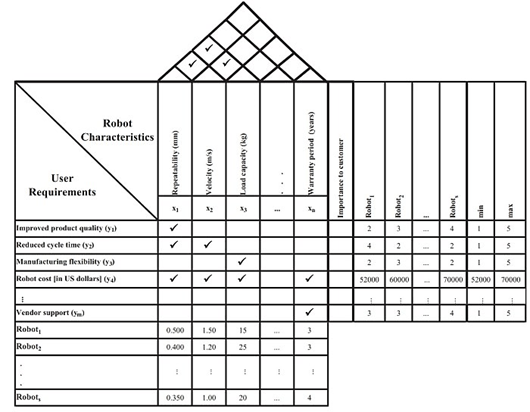
Figure 5. House of quality for the robot selection problem
The roof matrix in the HOQ is employed to denote the inner dependence among the robot characteristics. Below the relationship matrix, objective measures (i.e., data related to the abovemen- tioned robot characteristics for each of the short-listed robot alternatives) are indicated.
The rightmost part of the HOQ, which captures the user’s perspective, presents the data that results from the competitive analysis of the robot alternatives with respect to user requirements. In accordance with customer requirement ratings in earlier studies, performance with respect to user requirements other than ‘‘cost’’ has been scaled from 1 to 5, where 1 and 5 represent the worst and the best, respectively.
To avoid problems regarding scale differences, data concerning robot characteristics are normalized using a linear normalization procedure. It is obvious that the normalized data lie in the [0,1] interval, and the robot characteristic is more favorable as the normalized data approaches 1. To preserve conformity with other user requirements data that are denoted using a [1, 5] scale, cost data related to robot alternatives are normalized in a way to obtain a value of 5 for the lowest cost robot and a value of 1 for the robot with the highest cost.
The importance weights of the user requirements are determined using the AHP, which has been previously employed for prioritizing customer requirements within QFD framework (2). AHP is a multicriteria decisionmaking technique that is based on ratio scales and pairwise comparisons. In AHP, the relative importance values are determined using pairwise comparisons with a scale of1 to 9, where a score of 1 indicates equal importance between the two elements, and 9 represents the extreme importance of one element compared to the other one.
The values in between signify varying degrees of importance between these two extremes. Obviously, the weights for the user requirements may vary with respect to the application type of industrial robots.
Then, fuzzy linear regression is employed to estimate the parameters of the functional relationships between user requirements and robot characteristics, and among robot characteristics themselves. As in several previous works on fuzzy regression, the H value can be set to 0.5 for the base case. When the data set is sufficiently large H could be set to 0, whereas a higher H value is suggested as the size of the data set becomes smaller (33).
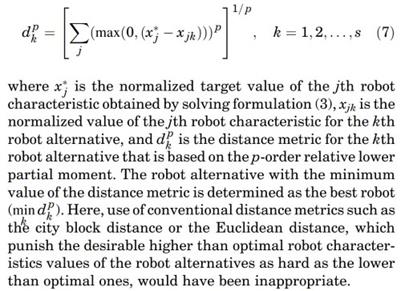
Using the normalized data for the robot selection problem, parameter estimations are obtained by fuzzy linear regression. Because no fuzziness is considered in the system parameters, only the center value estimates obtained from fuzzy regression are employed in formulation (3) to determine the target values for robot characteristics, whereas the spread values are disregarded (31). To determine the ranking order of robot alternatives, the following distance metric is used:
Date added: 2024-02-23; views: 673;